📚 多目标追踪论文总结
目录表格
| 简称 | 发表信息 | 核心贡献描述 | 具体信息 | 传感器 | 其他 |
|---|---|---|---|---|---|
| SORT | ICIP2016 | TBD框架的开创论文 | 查看 | camera | - |
| DeepSORT | ICIP2017 | 首个引入外貌特征的MOT | 查看 | camera | - |
| AB3DMOT | IROS2020 | 将TBD带入3D追踪邻域 | 查看 | LiDAR | 待细看 |
| CenterTrack | ECCV2020 | 转换为跟踪点 | 查看 | camera | - |
| JDE | ECCV2020 | JDE开创论文 | 查看 | camera | - |
| FairMOT | IJCV2021 | JDE改进 | 查看 | camera | - |
| EagerMOT | IRCA2021 | 首个将相机激光雷达融合的TBD框架 | 查看 | LiDAR+camera | - |
| JMODT | IROS2021 | 联合检测框架 | 查看 | LiDAR+camera | - |
| GIAOTrack | ICCVW2021 | NSA KF, EMA Bank | 查看 | camera | Visdrone,offline |
| DeepFusionMOT | RAL2022 | 提出4阶段的数据关联 | 查看 | LiDAR+camera | - |
| ys_tracker | TITS2022 | 为激光引入检测置信度,添加激光特特征 | 查看 | LiDAR | - |
| simpletrack | ECCV2022 | 全面总结TBD的问题 | 查看 | LiDAR | - |
| ByteTrack | ECCV2022 | 引入二阶段的数据关联 | 查看 | camera | - |
| MOTR | ECCV2022 | 首个E2EMOT | 查看 | camera | - |
| TrackFormer | CVPR2022 | 基于Transformer的E2EMOT | 查看 | camera | - |
| StrongSORT | TM2023 | Deepsort现代版,两个新机制 | 查看 | camera | - |
| DFRFast | ICRA2023 | C++又快又好 | 查看 | LiDAR+camera | - |
| POLY-MOT | IROS2023 | 不同类目标采用不同运动模型 | 查看 | LiDAR | - |
| MOTRv2 | CVPR2023 | E2E+TBD,改进了E2E效果 | 查看 | camera | - |
| OC-SORT | CVPR2023 | 利用观测值来固定滤波误差 | 查看 | camera | - |
| ImprAsso | CVPR2023 | 改进的关联,匹配函数,遮挡初始化 | 查看 | camera | - |
| Fusiontrack | IROS2024 | 融合方法+提点模块 | 查看 | LiDAR+camera | - |
| DiffMOT | CVPR2024 | 采用扩散模型来进行非线性运动预测 | 查看 | camera | - |
| FastPOLY | RAL2024 | 仔细考虑运动模型的构建CTRV,引入旋亲和度- | 查看 | LiDAR | - |
| FastTrack | IJCV2024 | 并行卡尔曼滤波- | 查看 | camera | - |
| STT | ICRA2024 | Transformer取代更多模块 | 查看 | LiDAR | - |
| Co-MOT-tits | TITS2025 | 提出改进的GNN进行运动建模-。未开源 | 查看 | LiDAR | - |
| MMTracker | AAAI2025 | ? | 查看 | camera | - |
| MambaTrack | ACMMM2025 | 引入Mamba模型取代KF | 查看 | camera | - |
| MCTrack | Arxiv2025 | 效果最好的开源追踪器 | 查看 | LiDAR+camera | - |
| ERMOT | TII2025 | 一种更新策略,未开源 | 查看 | camera | - |
| MMFJDT | RAL2025 | 检测追踪融合框架,效果似乎不太好 | 查看 | LiDAR+camera | - |
| sambamotr | ICLR2025 | mamba结构的E2EMOT | 查看 | camera | - |
| DINOMOT | RAL2025 | 引入DINOv2特征提取模块 | 查看 | camera | - |
| HybridTrack | RAL 2025 | kf+数据驱动 | 查看 | LiDAR | - |
| RobMOT | TITS2025 | 针对检测器的kf+新的生命机制 | 查看 | LiDAR | - |
| TrackTrack | CVPR2025 | 以轨迹为核心进行管理 | 查看 | camera | - |
| LA-MORT | CVPR2025 | E2E,解决检测与关联竞争 | 查看 | camera | - |
Simple online and realtime tracking
🌟 基本信息
- 开源地址:https://github.com/abewley/sort
- 发表信息:2016 IEEE international conference on image processing (ICIP)
🎯 核心内容
- 提出了“基于检测的追踪”框架,在准确度和实时性上都比传统方法更好,是后面工作的基础。
💡 学习收获
- 使用的是kalman滤波进行状态估计,匈牙利算法进行匹配,距离函数使用的是IOU。
Simple online and realtime tracking with a deep association metric
🌟 基本信息
- 开源地址:https://github.com/HowieMa/DeepSORT_YOLOv5_Pytorch
- 发表信息:2017 IEEE international conference on image processing (ICIP)
🎯 核心内容
- 在SORT的基础上,增加了外貌特征网络,准确性得到了大大的提高。
3d multi-object tracking: A baseline and new evaluation metrics
🌟 基本信息
- 开源地址:https://github.com/xinshuoweng/AB3DMOT
- 发表信息:2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
🎯 核心内容
- 将TBD框架应用到LiDAR的MOT任务上。
Tracking Objects as Points
🌟 基本信息
- 开源地址:https://github.com/xingyizhou/CenterTrack
- 发表信息:2020 European conference on computer vision (ECCV)
🎯 核心内容
- 核心思想:把跟踪简化为“跟踪中心点”的问题。把每个目标表示为一个 2D 中心点(object center),并在两帧间预测中心位移(offset)来进行关联。
- 输入:当前帧 + 前一帧 + 上一帧跟踪中心点热力图(heatmap)
- 基于 CenterNet 的检测头:中心点热力图 + 尺寸回归 + 偏移回归
- Offset-based 简单贪心关联(Tracking-by-Offset)
Towards Real-Time Multi-Object Tracking
🌟 基本信息
- 开源地址:https://github.com/Zhongdao/Towards-Realtime-MOT
- 发表信息:2020 European conference on computer vision (ECCV)
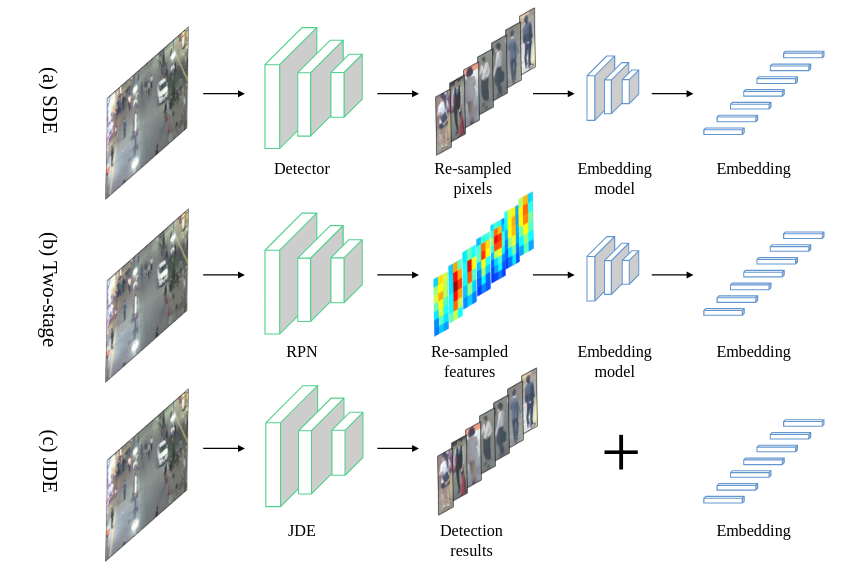
🎯 核心内容
- 提出了首个联合检测和嵌入(REID)的框架,将检测和特征提取集成到一个网络中,提高了多目标追踪的实时性。
- 单模型多任务学习:检测 + Embedding 同时输出
- 多任务损失 + 自动损失权重学习
- Embedding 学习采用 Cross-Entropy 而非 Triplet Loss
FairMOT: On the Fairness of Detection and Re-Identification in Multiple Object Tracking
🌟 基本信息
- 开源地址:https://github.com/ifzhang/FairMOT
- 发表信息:2021 International journal of computer vision (IJCV)
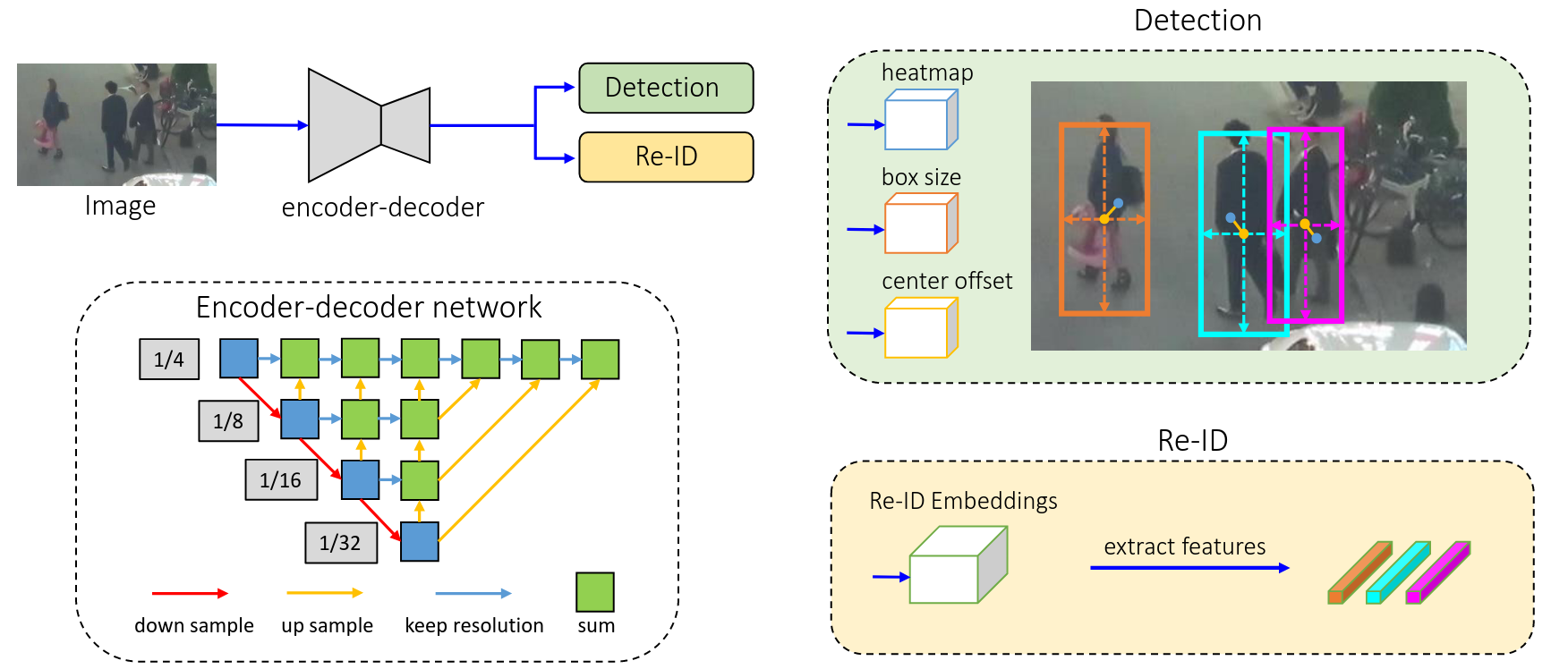
🎯 核心内容
作者指出,虽然单模型(one-shot)联合检测 + re-ID 的 MOT 框架在速度上有优势,但现有方法往往存在 “不公平性(unfairness)” —— 即检测任务被优先优化,而 re-ID 任务处在明显劣势,导致整体跟踪性能显著下降。
EagerMOT: 3D Multi-Object Tracking via Sensor Fusion
🌟 基本信息
- 开源地址:https://github.com/aleksandrkim61/EagerMOT
- 发表信息:2021 IEEE International Conference on Robotics and Automation (ICRA)
🎯 核心内容
- 将TBD框架应用到LiDAR和camera融合的MOT任务上。
- 其融合框架的想法是:camera用来平滑远处的目标,而LiDAR用来精确跟踪近处的目标。
🤔 提出问题
- 遮挡情况导致的FP、FN
- 融合方法使用复杂的特征提取,计算开销大。
- 主要还是因为引入了额外的特征提取器。不过可以通过直接使用检测器的backbone来代替(ys_tracker)。
- 没有充分利用两种传感器的信息,主要是视觉。造成的原因是激光范围太小。
💡 学习收获
- 可以说是第一个完整的多传感器融合的MOT框架。结构经典很清晰,后续工作可以在此基础上改进。
Joint Multi-Object Detection and Tracking with Camera-LiDAR Fusion for Autonomous Driving
🌟 基本信息
- 开源地址:https://github.com/Kemo-Huang/JMODT
- 发表信息:2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
GIAOTracker: A comprehensive framework for MCMOT with global information and optimizing strategies in VisDrone 2021
🌟 基本信息
- 开源地址:https://github.com/dyhBUPT/GIAOTracker
- 发表信息:2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW)
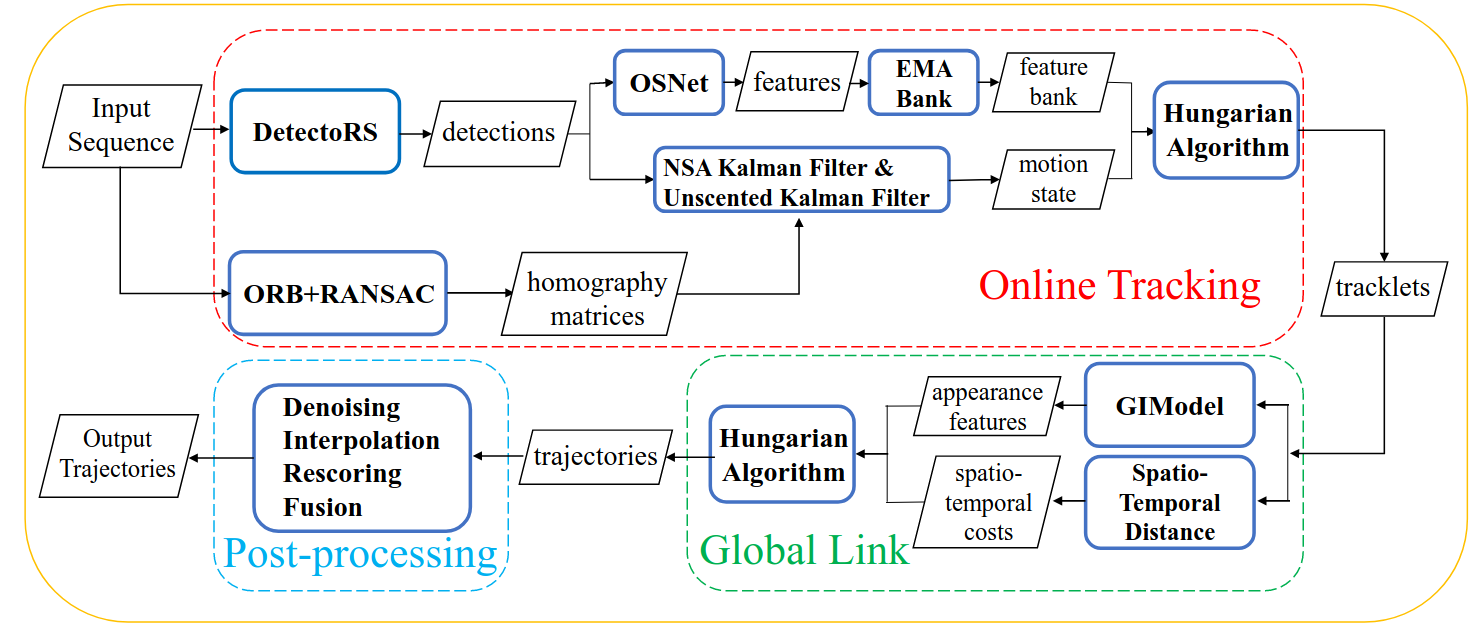
🎯 核心内容
- 整体是一个offline的追踪器,不过它有几个先进的模块值得学习。也是后面strongsort的基础。
- NSA KALMAN:说白了,就是自适应噪声的卡尔曼滤波器
- EMA BANK:EMA + BANK机制。EMA会考虑目标变化,而BANK则保存历史的外貌特征
- ORB+RANSAC: 由于是无人机数据集,作者对输入图像做了一些对齐变换。
DeepFusionMOT: A 3D Multi-Object Tracking Framework Based on Camera-LiDAR Fusion With Deep Association
🌟 基本信息
- 开源地址:https://github.com/wangxiyang2022/DeepFusionMOT
- 发表信息:IEEE Robotics and Automation Letters 2022
🎯 核心内容
- 提出了一个四阶段的数据关联方法。
- 在轨迹管理阶段加了一点小微调,增加了一个状态。
💡 学习收获
- 代码很清晰,结构好。可以以此为基础继续代码上的改进。
- 创新点很简单,可以说是将eagermot的工作清晰化了。
3D Multi-Object Tracking in Point Clouds Based on Prediction Confidence-Guided Data Association
🌟 基本信息
- 开源地址:https://github.com/hailanyi/3D-Multi-Object-Tracker
- 发表信息:IEEE Transactions on Intelligent Transportation Systems 2022
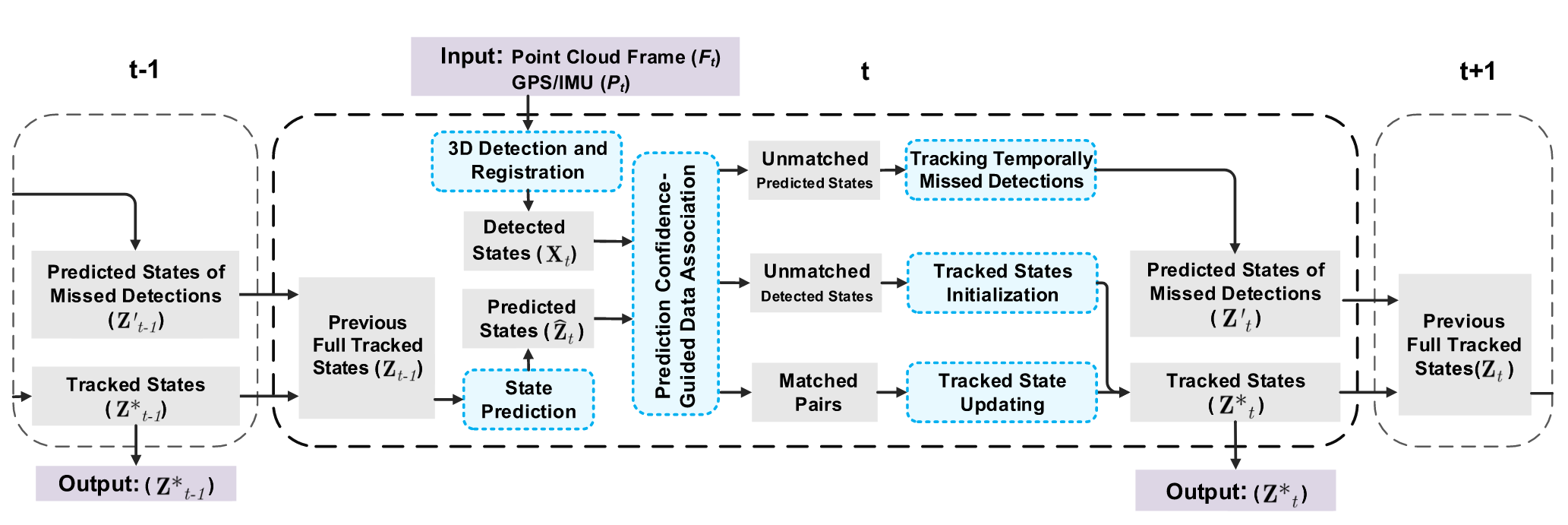
🎯 核心内容
- 提出了一个置信度网络来进行数据关联
- 置信度是一种仿卡尔曼滤波的结构,分更新和预测两个部分。内嵌到代价矩阵中,用贪婪算法来匹配。
- 采用了CA模型进行状态估计,在MCTrack中也提到CA的上限更高,不过具体效果还是看数据集。
- 直接使用backbone来进行特征提取,没有使用额外的特征提取器。
💡 学习收获
- 关于置信度设计,理论上感觉不太合理,但是效果得到实验证实,并且思路是对的。主要是体现这个置信度的方式感觉不合理。如果能像它论文途图那样更好。我认为可以考虑从噪声入手。
😃 其他
- ys_tracker : 作者是原神哥
Simpletrack: Understanding and rethinking 3d multi-object tracking
🌟 基本信息
- 开源地址:https://github.com/tusen-ai/SimpleTrack
- 发表信息:European conference on computer vision 2022
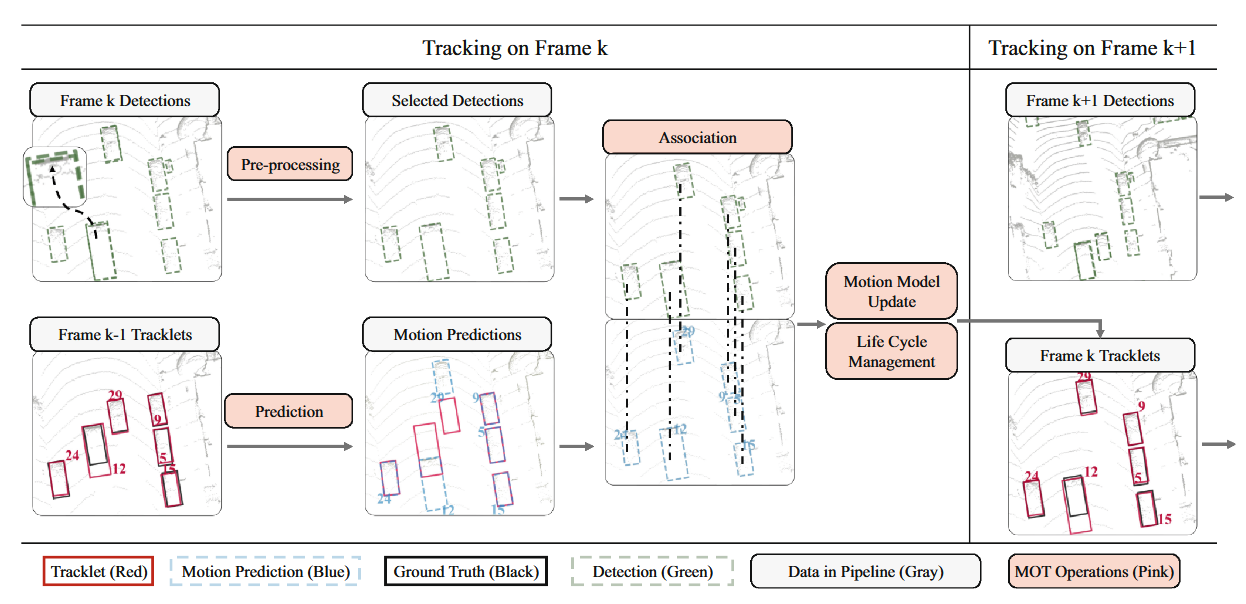
🎯 核心内容
- 作者充分分析了TBD框架的好坏。从检测、关联、运动模型和生命周期管理4个部分进行了深入的分析。
- 检测结果预处理:一般来说原生检测结果会非常多(提高AP),但是追踪器用往往只要很少一部分。旧方法使用阈值过滤来预处理。但是阈值设置鲁棒性差,可能会滤掉一些真实目标。作者的想法是采用严格阈值的NMS来替代。既去除检测器的重复,又避免误删。
- 数据关联方法:文章对比了匈牙利算法和贪婪算法。发现他们与距离函数的关系非常密切。IoU下两种方法差不多,距离函数下贪婪算法表现更好。
- 针对遮挡/稀疏点云问题。本文提出两个阶段的数据关联方法。类似ByteTrack,都是使用检测置信度来匹配。不同的是二阶段中,检测结果只用来关联,不参与状态更新,而是采用运动模型来预测新状态。
💡 学习收获
- IoU下两种方法差不多,距离函数下贪婪算法表现更好。这一点可以注意,如果之后要设计多种匹配的时候。
- 出现IDS的主要原因其实是由于轨迹的提前中断。论文中提到90%以上都是因为这个。而造成中断的无非就是遮挡和点云稀疏。
- 本文提到,Nuscenes数据集基准可能不太合理。静态车多,传感器频率低(2Hz),评价标准注重轨迹质量(还使用插值)。
ByteTrack: Multi-Object Tracking by Associating Every Detection Box
🌟 基本信息
- 开源地址:https://github.com/ifzhang/ByteTrack
- 发表信息:European conference on computer vision 2022
🎯 核心内容
- 提出了一个二阶段的数据关联方法,根据检测结果的执行度进行两次匹配。结果证明提升效果非常明显
MOTR: End-to-End Multiple-Object Tracking with Transformer
🌟 基本信息
- 开源地址:https://github.com/megvii-research/MOTR
- 发表信息:European conference on computer vision 2022
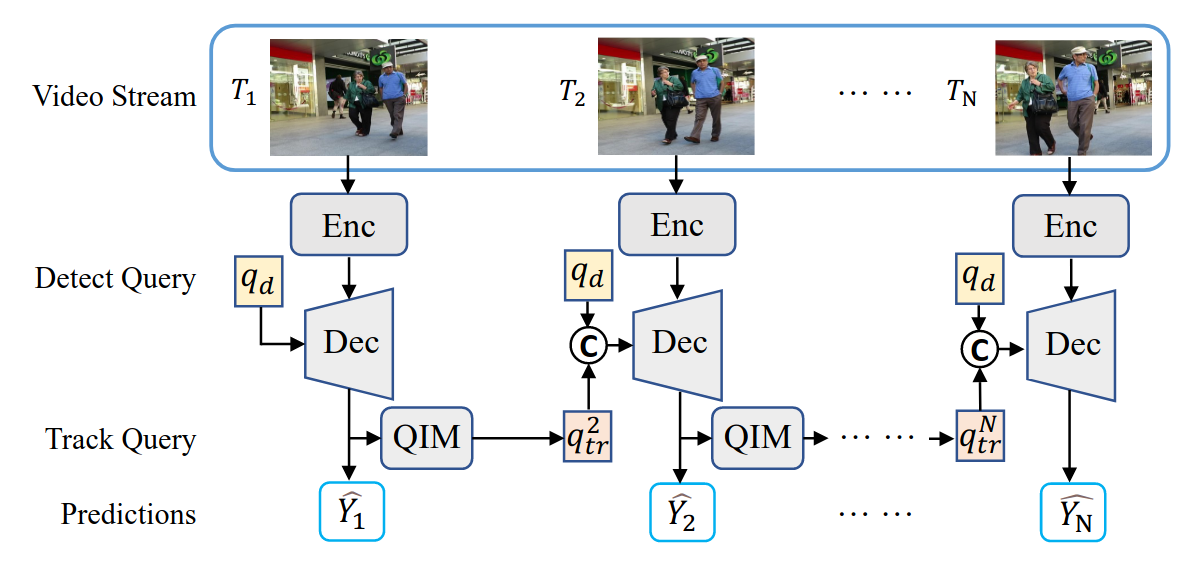
🎯 核心内容
- 提出了首个端到端的多目标追踪框架,正式将端到端方法引入MOT领域。
- 把 DETR 的 object query 扩展为具有时间维度的 track query,使同一查询在不同帧持续更新表示同一物体。
TrackFormer: Multi-Object Tracking with Transformers
🌟 基本信息
- 开源地址:https://github.com/timmeinhardt/trackformer
- 发表信息:CVPR 2022
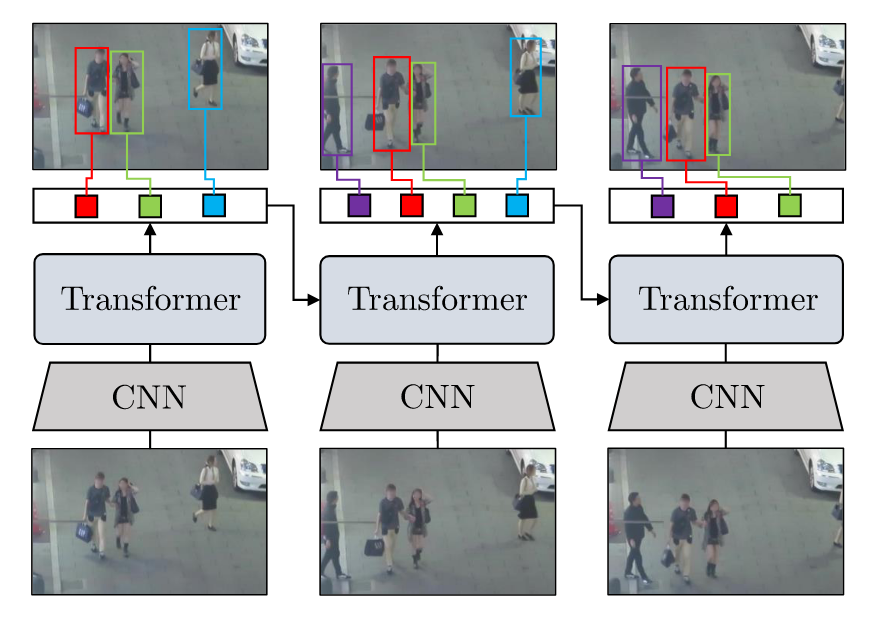
🎯 核心内容
- 提出了基于Transformer的端到端多目标追踪框架TrackFormer。新的框架,作者称之为“tracking-by-attention”。
- 直接用 Transformer decoder 的 attention 完成检测 + 关联的联合建模
StrongSORT: Make DeepSORT Great Again
🌟 基本信息
- 开源地址:https://github.com/dyhBUPT/StrongSORT
- 发表信息:IEEE Transactions on Multimedia 2023
🎯 核心内容
- 如其名,StrongSORT就是Deepsort的加强版,在Deepsort的基础上,使用了最新的追踪机制,然后添加了两个新模块。
- AFLink: 解决同一目标被错误地分成多个 tracklets
- GSI: 解决检测器漏检导致轨迹断裂。通过使用高斯插值的方式进行平滑轨迹
DFR-FastMOT: Detection Failure Resistant Tracker for Fast Multi-Object Tracking Based on Sensor Fusion
🌟 基本信息
- 开源地址:https://github.com/MohamedNagyMostafa/DFRFastMOT
- 发表信息:2023 IEEE International Conference on Robotics and Automation (ICRA)
🎯 核心内容
- 首先是距离函数的使用,非常简单。相机用IOU,雷达用3D中心距离。然后设置两个阈值,接着设置参数占比来整合两种传感器的距离函数矩阵。
- 数据关联方法是介于匈牙利算法和贪婪算法之间。文中描述是:直接选择距离函数最好的进行匹配,直到阈值。因此,该算一个贪婪算法吧。
- 在3D状态也做2D的估计。
💡 学习收获
- 采用的还是经典框架
- 这个方法很奇怪,基本没有什么大的变动,但是它效果却很好。
- 有一些简单的多传感器融合的地方,例如遗失帧取两种传感器的最小值。
Poly-MOT: A Polyhedral Framework For 3D Multi-Object Tracking
🌟 基本信息
- 开源地址:https://github.com/lixiaoyu2000/Poly-MOT
- 发表信息:2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
🎯 核心内容
- 提出了两个运动模型:CTRA用于车辆等,Bicycle用于自行车等。
💡 学习收获
- 他们实验室走的是传统模型路线,设计了非常精细的模型,并且配套复杂的处理机制,从而提高最终效果。
MOTRv2: Bootstrapping End-to-End Multi-Object Tracking by Pretrained Object Detectors
🌟 基本信息
- 开源地址:https://github.com/megvii-research/MOTRv2
- 发表信息:2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
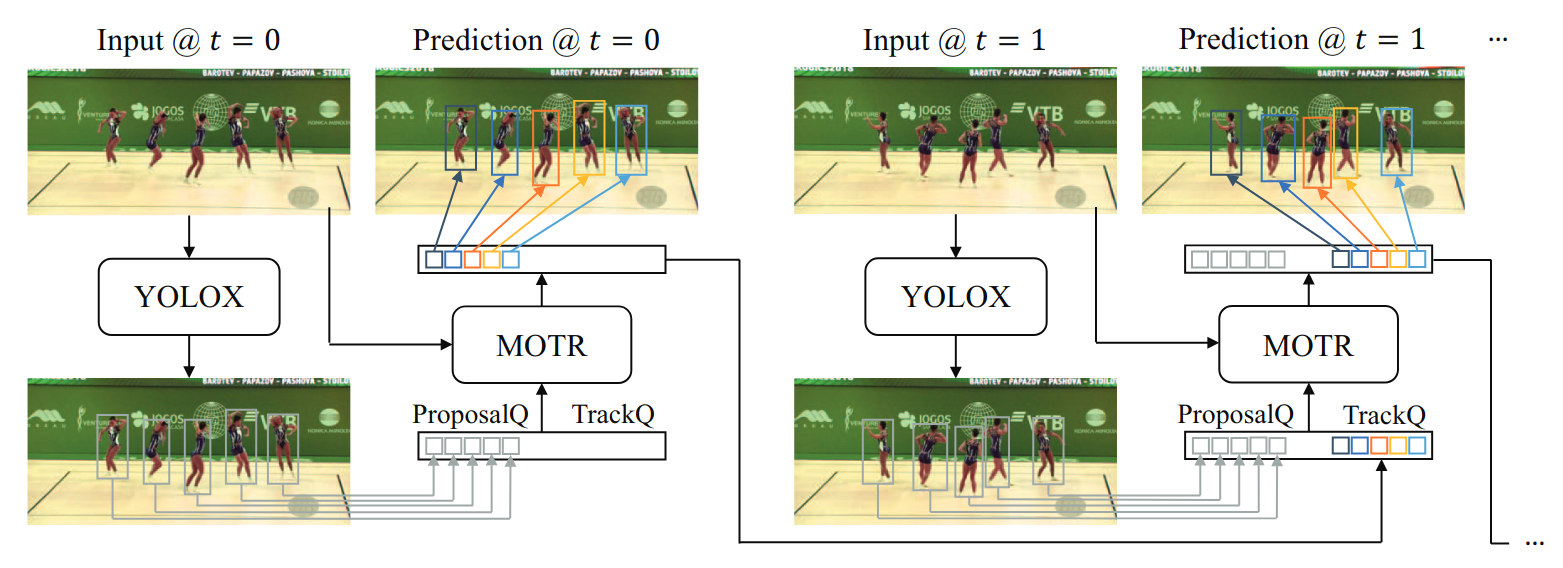
🎯 核心内容
- MOTR是第一个端到端的多目标追踪框架,但是效果并不好。MOTRv2通过分析,分为性能不好的主要原因是检测性能不好。于是,他们采取了一个类似与TBD的思路,提出了用一个预训练 YOLOX proposal 作为 anchor,引导 MOTR
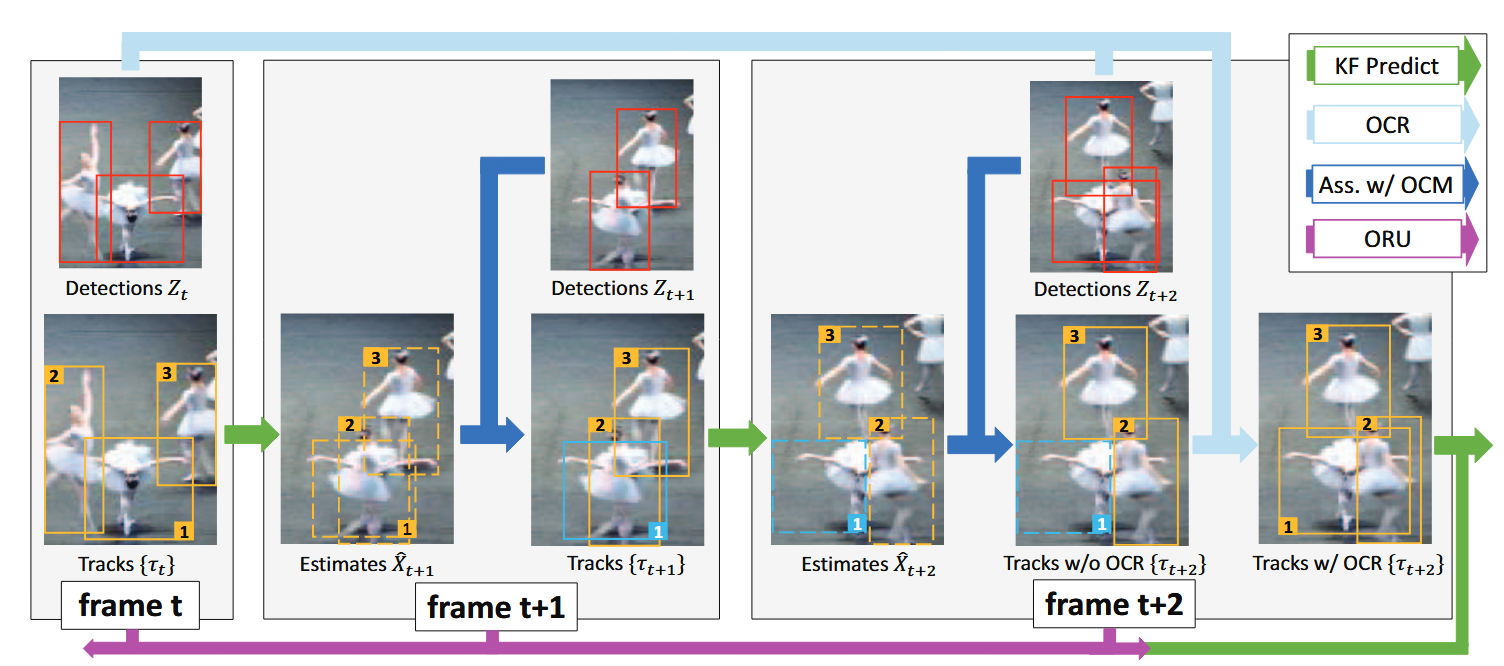
Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking
🌟 基本信息
- 开源地址:https://github.com/noahcao/OC_SORT
- 发表信息:2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
🎯 核心内容
- 提出SORT的三个问题:1. 依赖于高频检测以拟合线性运动。 2. 当目标丢失时,误差积累迅速(特别是速度)。 3. 现代检测器的状态方差比SORT估计出来的结果更小。
- 对于问题2,作者提出了一个新模块,’re-update’。当目标丢失再次被检测到时,激活这个模块。ORU
- 还设计了一个考虑方向的关联矩阵,考虑了目标运动方向。OCM
- 此外,还提出了一种启发式的改进模块,讲轨迹最后一次的观测值和检测值进行关联尝试。OCR
💡 学习收获
- 文章推导出一个非常反直觉的结论:当$\delta_t$较小的时候,$\delta_t$越大两个时刻角度估计的误差越小。
An Improved Association Pipeline for Multi-Person Tracking
🌟 基本信息
- 开源地址:未开源
- 发表信息:2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)
🎯 核心内容
- 组合匹配(Combined Matching, CM)
- 这部分内容是针对BTYETRACK的改进。它说BYTE的方案有两个问题,未激活轨迹是无法和低置信度检测匹配的;总是高置信度检测先匹配,即使低置信度才是正确的。
- 为此,作者提出了一个组合匹配手段。首先还是先做一个二阶段的匹配,但是这步主要是为了调试出阈值。然后根据这个阈值,计算出一个缩放因子(低置信度和高置信度的检测和轨迹之间的距离函数会乘这个因子)。直接concat得到一个单一的距离矩阵,然后做匈牙利匹配。
- 组合代价函数(Combined Distance, CD): 涉及了一个带权重的距离矩阵。包括马氏距离,外貌距离,IOU。
- 遮挡感知初始化(Occlusion Aware Initialization, OAI): 该模块是为了减少误检的情况。作者认为误检的主要原因是因为目标太拥挤,导致检测器分不清边界,从而多生成了检测结果。解决办法很简单,对于一个新的检测结果,如果他和已有目标IOU非常高,那么就排除。
💡 学习收获
这就是一个纯工程性的思路,所以也是发表在WORKSHOP上的。它还集成了相机运动补偿、NSA 卡尔曼滤波、YOLOX 检测器和重识别模型等等方法。九龙之力好吧。
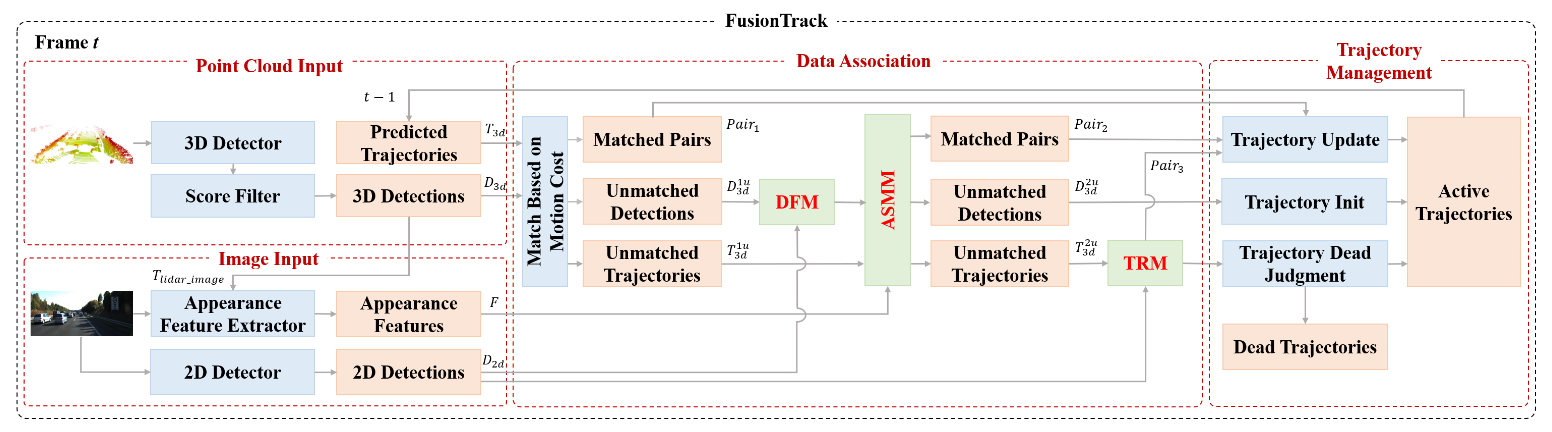
FusionTrack: An Online 3D Multi-object Tracking Framework Based on Camera-LiDAR Fusion
🌟 基本信息
- 开源地址:https://github.com/zengwz/FusionTrack
- 发表信息:2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
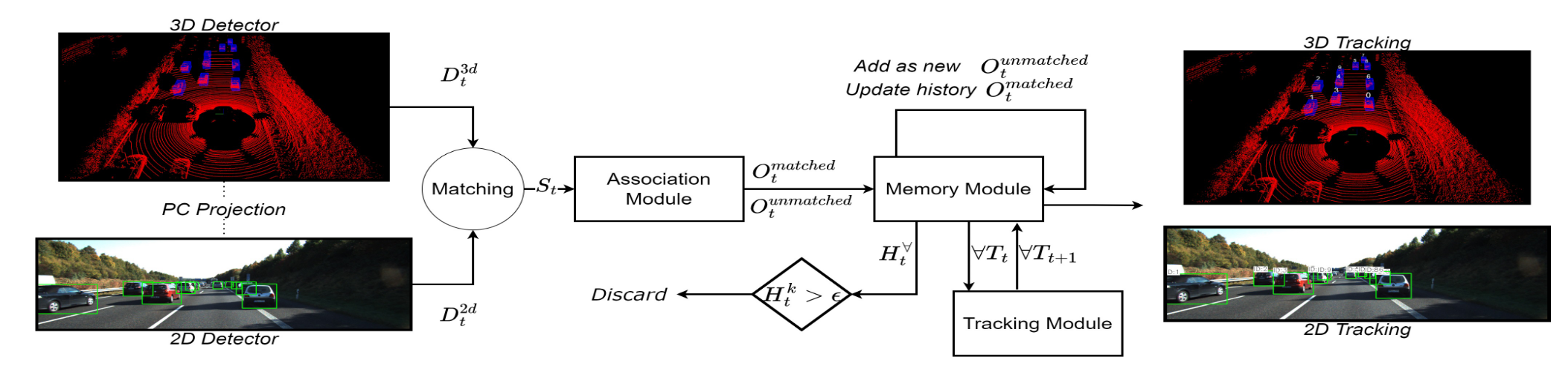
🎯 核心内容
- 新的融合框架:利用了相机的外貌特征。数据关联也引入融合。
- 检测滤波模块(DFM):针对误检的情况,过去的解决方法是多检测几帧才确认追踪,这引入了延迟问题。作者将未匹配的检测投影到2D进行检查,确认是否是误匹配。
- 外观相似度匹配模块(ASMM):二阶段数据关联引入外貌特征进行匹配。之前是用GIoU进行匹配。这个部分作者还新建了一个特征提取网络
- 轨迹恢复模块(TRM):针对漏检的目标,作者提出了这个模块。还是使用相机的检测结果来帮助3D检测。当轨迹的预测结果投影和相机重合度高,就认为这个预测是好的,保留并且作为3D的检测结果。
♿ 工作流程
💡 学习收获
- 注意到,本文使用了外貌特征。因此,作者也使用了EMA模块来更新外貌特征。
- 本文使用的是KF-CA模型。
- 本文非常适合作为对比目标。它是IROS24年结果,并且方法也很常规,指标不算特别高。
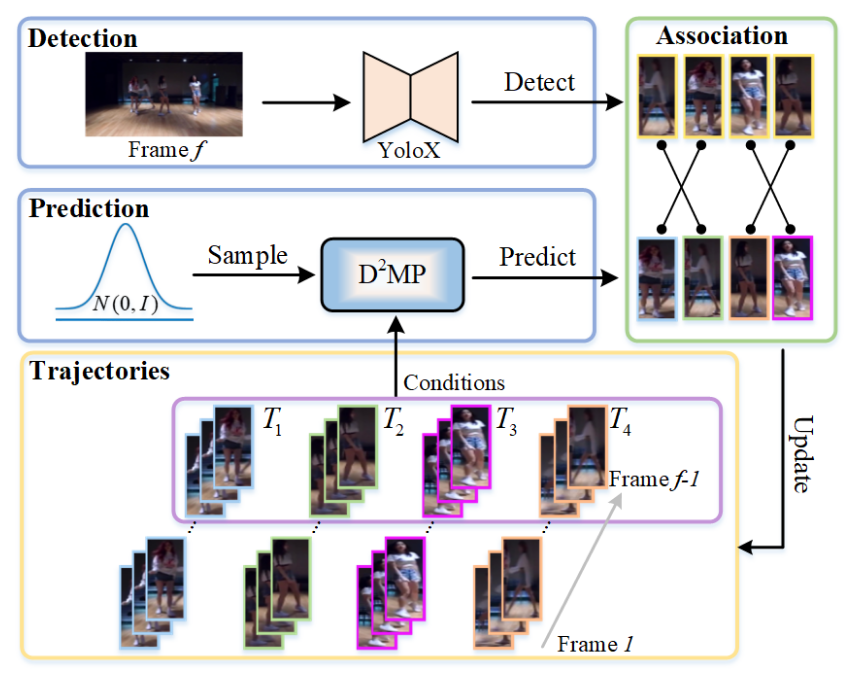
DiffMOT: A Real-time Diffusion-based Multiple Object Tracker with Non-linear Prediction
🌟 基本信息
- 开源地址:https://github.com/Kroery/DiffMOT
- 发表信息:2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
🎯 核心内容
多目标跟踪(MOT)在跟踪-by-检测框架中高度依赖运动预测器。主流方法大多采用近似线性的模型来做预测,但在更加复杂的场景中不适用。 文章将扩散模型引入到目标的运动预测中,提出了一个D2MP网络
STT: Stateful Tracking with Transformers for Autonomous Driving
🌟 基本信息
- 未开源
- 发表信息:2024 IEEE International Conference on Robotics and Automation (ICRA)
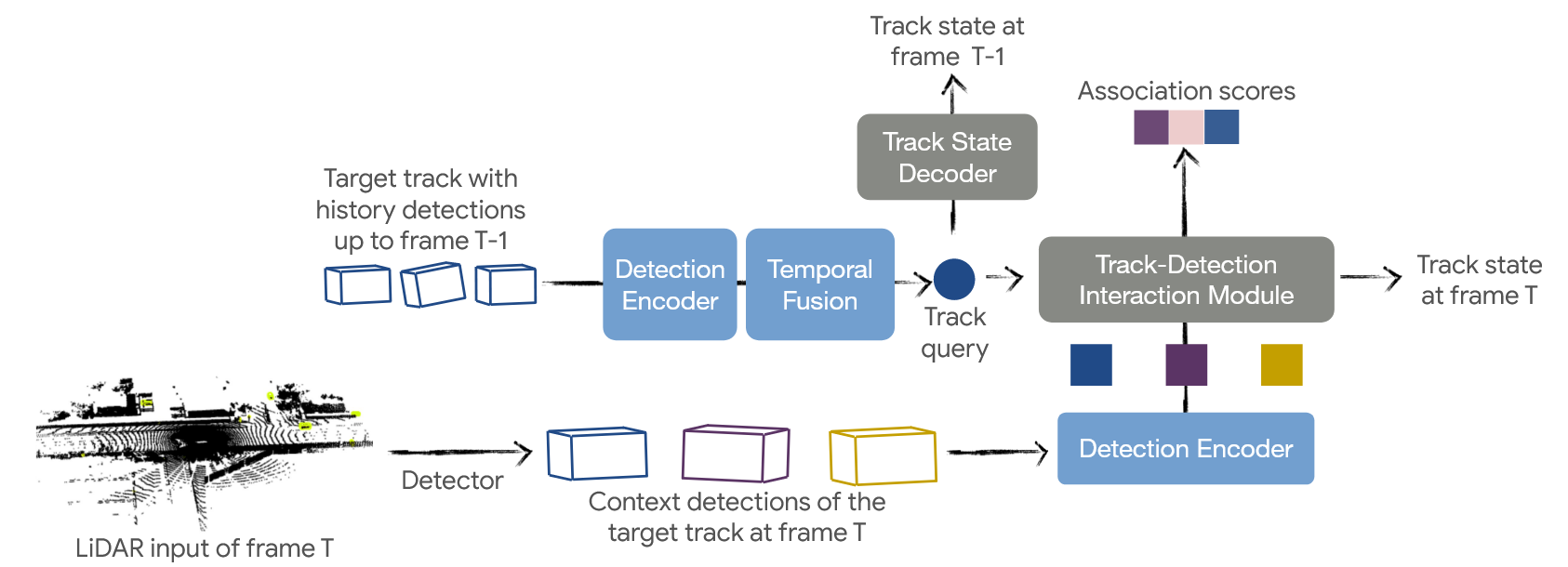
🎯 核心内容
- 作者设计了Encoder和Decoder将目标状态在两个空间进行转换。然后基于Transformer结构设计了TF模块,将历史的检测信息提取出query。TDI模块交叉注意力模块得到关联矩阵。随后还是进行的匈牙利算法等常规方法,但是论文中没讲。
💡 学习收获
- 虽然文章整体没怎么写清楚,但是思路确实前沿,跟我的构想越细究越像。
- 由于匹配和生命周期管理都是不可微的,因此这个部分是无法参与到神经网络的反向传播的。因此两者需要分开进行训练/调参。
- 损失函数,我觉得就先采用该文章的交叉熵损失。
Co-MOT: Exploring the Collaborative Relations in Traffic Flow for 3D Multi-Object Tracking
🌟 基本信息
- 未开源
- 发表信息:IEEE Transactions on Intelligent Transportation Systems ( Volume: 26, Issue: 4, April 2025)
- 其他:注意有两个简称Co-MOT的方法,为了避免混淆,这里使用Co-MOT-tits来表示,是使用GNN修正KF的方法。另一种是E2E方法。
MambaTrack: A Multi-Modal Multi-Object Tracking Framework with a Novel Kalman Filter
🌟 基本信息
- 开源地址:https://github.com/JackWoo0831/Mamba_Trackers (非官方实现)
- 发表信息:ACMMM 2025
🎯 核心内容
- 将Mamba模块引入追踪器,取代卡尔曼滤波器从而达到更好的非线性预测效果。
💡 学习收获
- 该文章仅仅添加了Mamba模块,其它都使用的SORT基本框架。但是其效果非常好,说明Mamba模块确实有很好的效果。
🎨 TODO
- 实现Mamba模块,并添加到SORT中。
- 具体理解Mamba原理。
DINO-MOT: 3D Multi-Object Tracking With Visual Foundation Model for Pedestrian Re-Identification Using Visual Memory Mechanism
🌟 基本信息
- 开源地址:未开源
- 发表信息:RAL2025
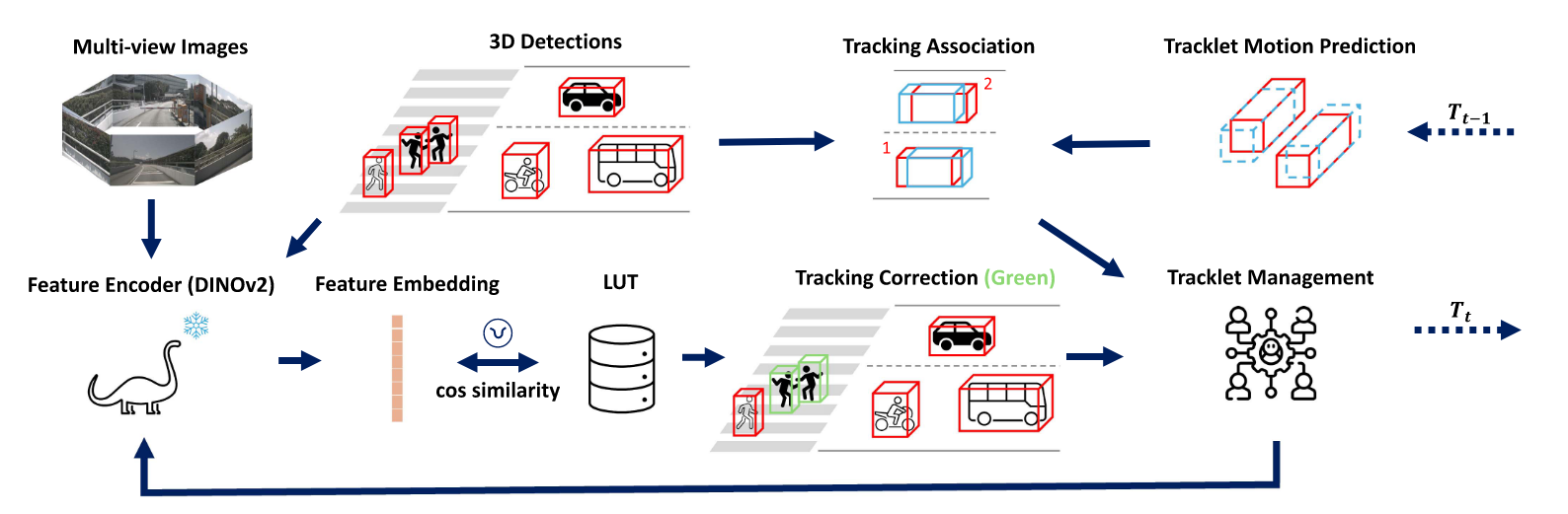
🎯 核心内容
- 将DINOv2特征提取器引入MOT
- 它并非采用的传统REID的方法,而是使用视觉LUT来矫正追踪的情况。
- 文章采用了两条线来完成追踪任务。主线依旧是传统的TBD框架,并且算是各方法的大成者,不同目标设置不同模型、不同参数、不同的关联矩阵和阈值。此外,另一条线就是重识别,利用LUT模块来纠正IDSW。主要思路是,如果提取到的特征和LUT库中的非常相似,那么这就是同一个目标,如果之前匹配错了此时会进行纠正。
HybridTrack: A Hybrid Approach for Robust Multi-Object Tracking
🌟 基本信息
- 开源地址:https://github.com/leandro-svg/HybridTrack
- 发表信息:IEEE Robotics and Automation Letters,2025,07
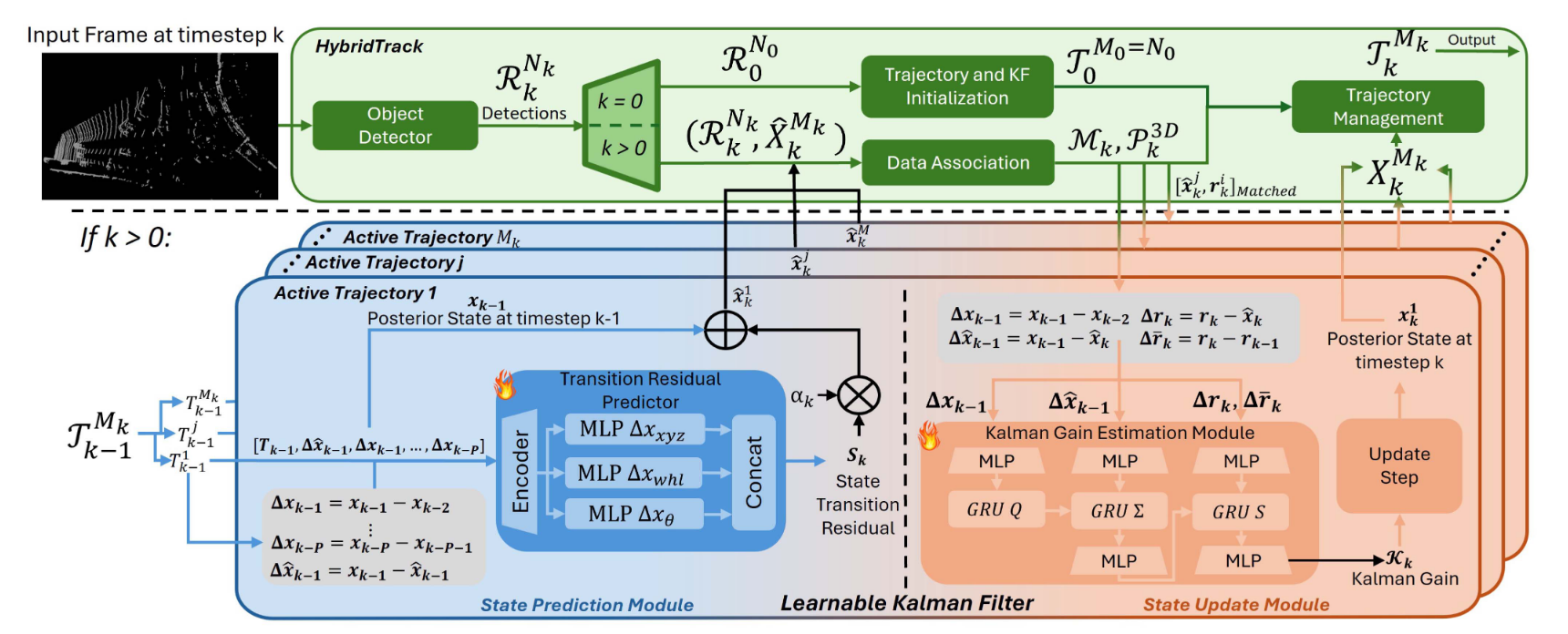
🎯 核心内容
- 设计了一个前端MLP网络,后端KALMANNET的新型滤波器
RobMOT: 3D Multi-Object Tracking Enhancement Through Observational Noise and State Estimation Drift Mitigation in LiDAR Point Clouds
🌟 基本信息
- 开源地址:未开源
- 发表信息:TITS2025
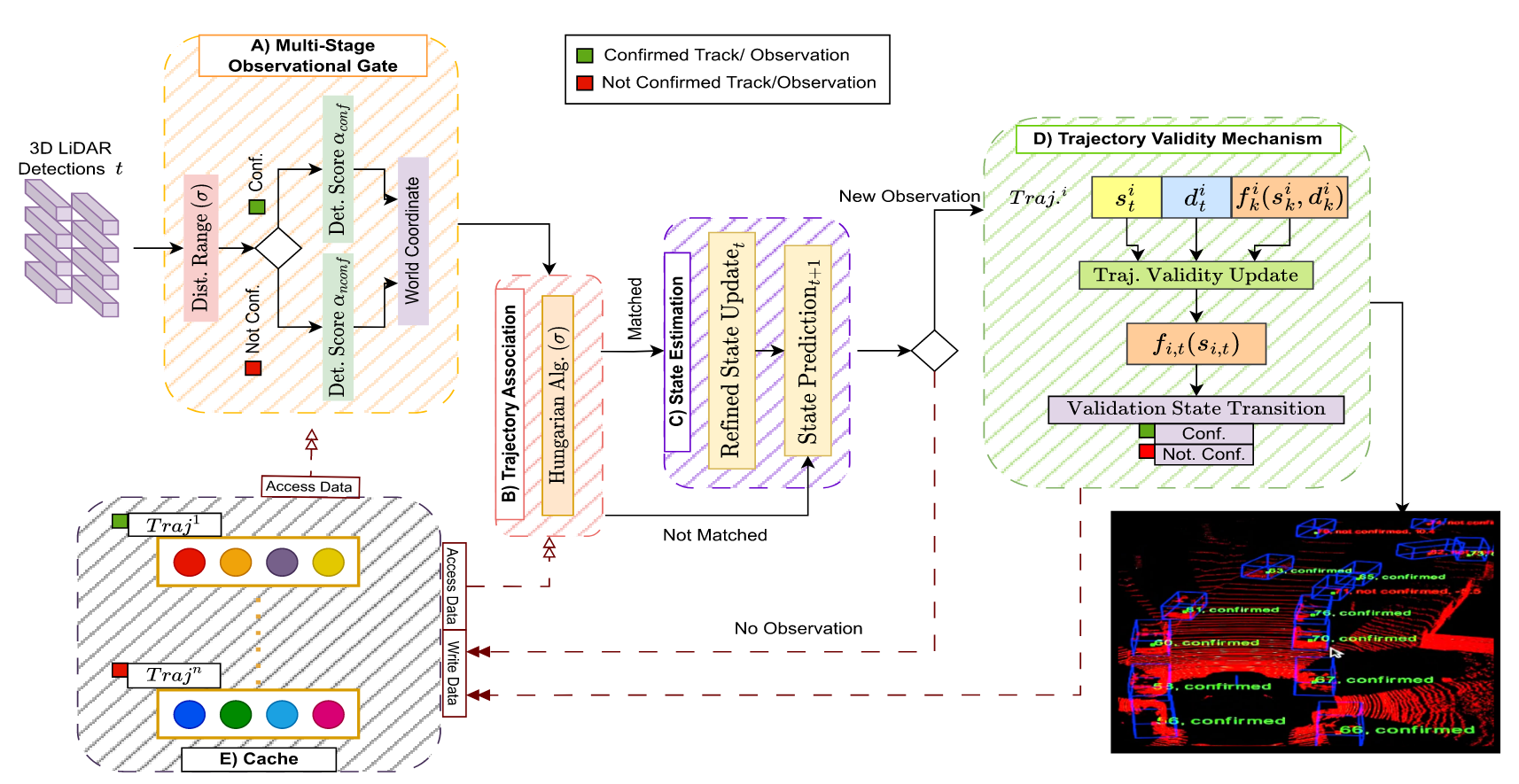
🎯 核心内容
- 采用了一种新的检测数据提取方式。就是更宽松了,放入一些低置信度但是也可能是真检测的结果。
- 针对每种检测器提出了一个精修的卡尔曼滤波器。经过数据统计,发现检测器的误差呈现出一个高斯分布,所以新增了一个噪声参数来进行补偿。
- 轨迹验证机制:用来消除幽灵轨迹。大致就是一个轨迹有一个评分机制,如果评分高于阈值就认定为是真实轨迹。是一种降低误检的机制。
- 提出了一种新的轨迹生命管理策略,通过协方差来决定轨迹的存活与否,通过目标的不确定度来决定是否继续跟踪。这框架确实和之前大不相同。
Focusing on Tracks for Online Multi-Object Tracking
🌟 基本信息
- 开源地址:未开源
- 发表信息:2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
🎯 核心内容
本文最大的特点就是不再是过去全局优化(匈牙利算法),而是以轨迹为中心进行设计,聚焦每个轨迹的局部匹配精度和可靠初始化,适配多目标跟踪中轨迹与检测结果的强关联性。
- 数据关联:Track-Perspective-Based Association(TPA)
- 全面使用了检测结果。本文使用到的检测结果包括 NMS后的高置信度结果、NMS后的低置信度结果、NMS排除但是置信度高的结果。如此一来,数据关联的候选集就非常丰富。然后作者的匹配方法其实是一个贪婪算法。检测和轨迹都是当前集合最优(互相)的时候认为是匹配。然后集合缩小,重复直到所有都低于阈值。
- 轨迹初始化:Track-Aware Initialization(TAI)
- 由于检测结果的候选非常多,自然追踪器误检的情况会变多,作者就专门就此提出了一种初始化方法。其实就是一个NMS,在匹配任务完成后,围绕“匹配的轨迹”和“置信度非常高的检测”为中心做NMS,以排除误检。
💡 学习收获
本文的方法也是非常的简单。我认为提点的最大原因在于检测结果收录的更多了。所有模块都是围绕这一点展开的。
LA-MORT: LA-MOTR: End-to-End Multi-Object Tracking by Learnable Association
🌟 基本信息
- 开源地址:https://github.com/PenK1nG/LA-MOTR
- 发表信息:2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR)
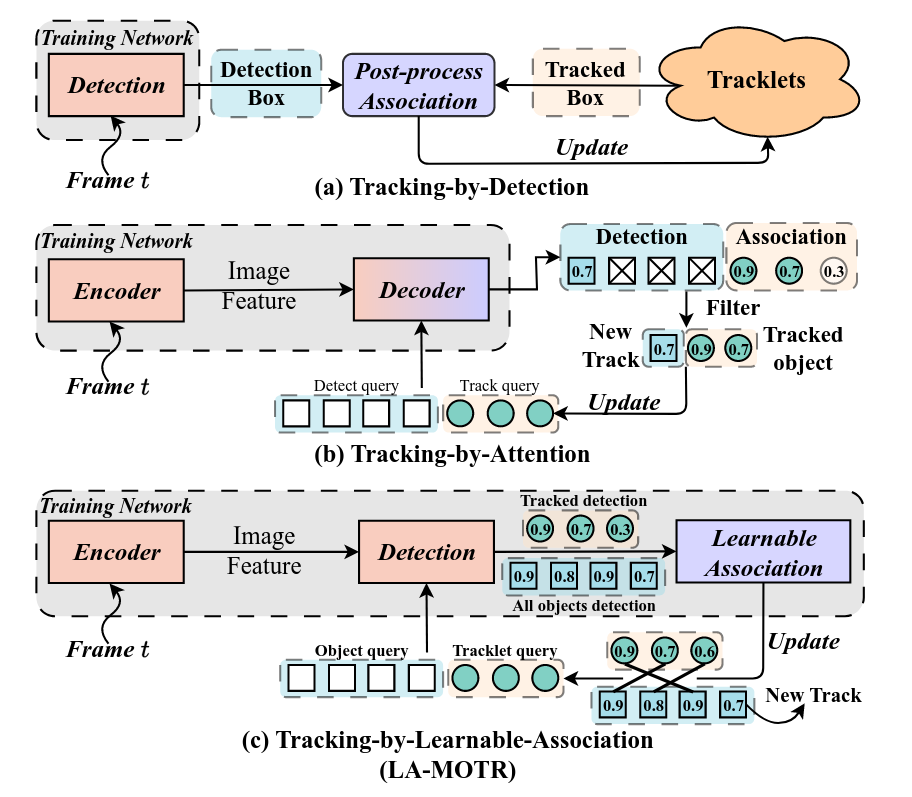
🎯 核心内容
- 提出了一个端到端的多目标追踪框架LA-MORT,解决了检测与关联之间的竞争问题。
- 文章认为现有的E2E方法