📚 滤波相关论文总结
目录表格
| 简称 | 发表信息 | 核心贡献描述 | 具体信息 | 其他 |
|---|---|---|---|---|
| Dynanet | TNNLS2021 | kalman引入神经网络 | 查看 | - |
| Kalmannet | TSP2022 | 构建了kalmannet,用来估计KG,噪声未知,模型可以不准确 | 查看 | - |
| bayesian kalmannet | TSP2025 | 从bayesian角度看待DNN辅助的卡尔曼滤波 | 查看 | - |
| DLBRMOT | TITS2024 | Bi-LSTM来构建运动模型 | 查看 | - |
| ODR | ICRA2021 | - | 查看 | 不确定 |
| ESER | IROS2023 | - | 查看 | 不确定 |
DynaNet: Neural Kalman Dynamical Model for Motion Estimation and Prediction
🌟 基本信息
- 开源地址:不开源,但是通过关系要到源码了
- 发表信息:IEEE Transactions on Neural Networks and Learning Systems ( Volume: 32, Issue: 12, December 2021)
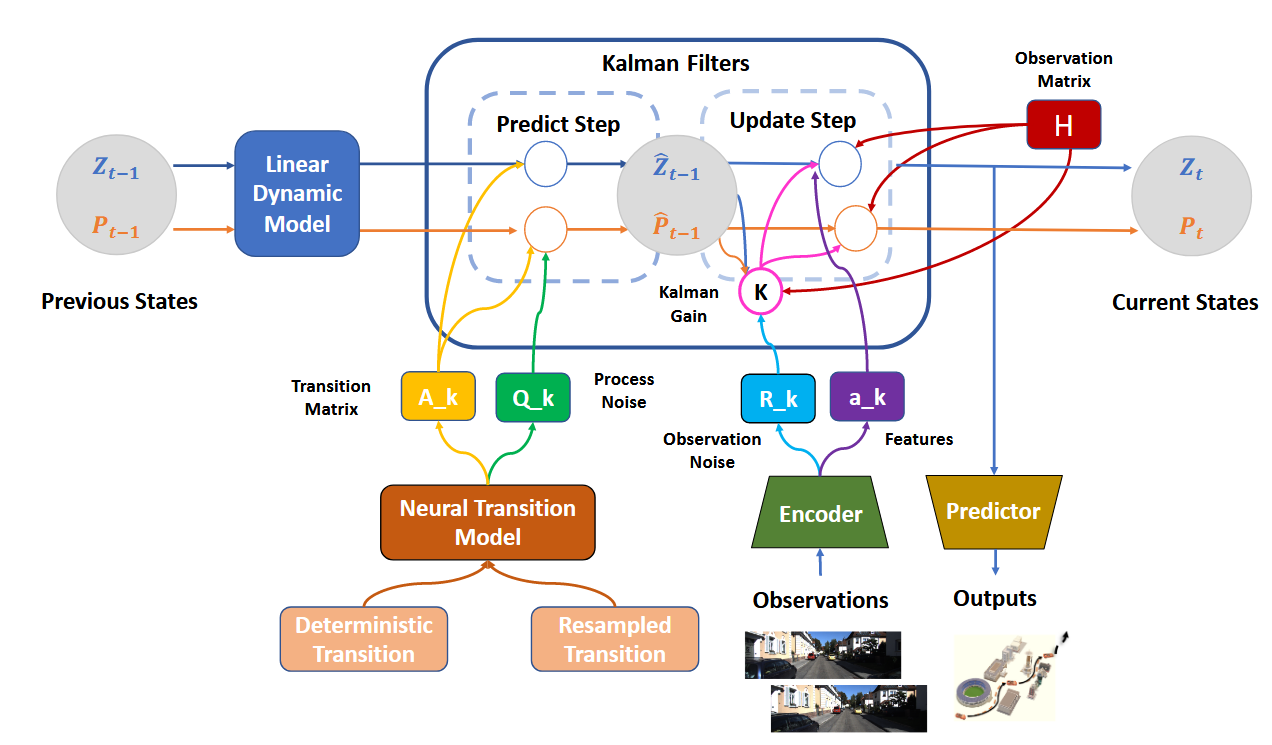
🎯 核心内容
- 将卡尔曼滤波扩展到神经网络,一方面有效果,还有一定的理论依据。
💡 学习收获
😃 其他
- 陈老师直接给了源码😋,但是一直没复现被批好几回😭
KalmanNet: Neural Network Aided Kalman Filtering for Partially Known Dynamics
🌟 基本信息
- 开源地址:https://github.com/KalmanNet/KalmanNet_TSP
- 发表信息:IEEE Transactions on Signal Processing
Bayesian KalmanNet: Quantifying Uncertainty in Deep Learning Augmented Kalman Filter
🌟 基本信息
- 开源地址:未开源
- 发表信息:IEEE Transactions on Signal Processing 2025
Deep Learning-Based Robust Multi-Object Tracking via Fusion of mmWave Radar and Camera Sensors
🌟 基本信息
- 开源地址:未开源
- 发表信息:IEEE Transactions on Intelligent Transportation Systems 2024
🎯 核心内容
- 融合了mmWave雷达和摄像头,通过深度学习来实现MOT
- 采用了一个基于Bi-LSTM的运动模型
Out-of-Distribution Robustness with Deep Recursive Filters
🌟 基本信息
- 开源地址:未开源
- 发表信息:2021 IEEE International Conference on Robotics and Automation (ICRA)
Enhancing State Estimation in Robots: A Data-Driven Approach with Differentiable Ensemble Kalman Filters
🌟 基本信息
- 开源地址:https://github.com/ir-lab/DEnKF
- 发表信息:2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)